
elevne's Study Note
딥러닝 파이토치 교과서 (6-4: ResNet(2)) 본문
이제 ResNet 모델을 구성할 차례였다. ResNet 의 전체 네트워크 구성을 위해 이를 구성하는 기본 블록과 병목 블록을 따로 정의한다. 우선 아래와 같이 기본 블록을 작성한다. 이는 ResNet18, ResNet34 에서 사용되며 합성곱 (3x3) 두 개로 구성된다.
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, in_channels, out_channels, stride = 1, downsample = False):
super().__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size = 3,
stride = stride, padding = 1, bias = False)
self.bn1 = nn.BatchNorm2d(out_channels)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size = 3,
stride = 1, padding = 1, bias = False)
self.bn2 = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace = True)
if downsample:
conv = nn.Conv2d(in_channels, out_channels, kernel_size = 1,
stride = stride, bias = False)
bn = nn.BatchNorm2d(out_channels)
downsample = nn.Sequential(conv, bn)
else:
downsample = None
self.downsample = downsample
def forward(self, x):
i = x
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.conv2(x)
x = self.bn2(x)
if self.downsample is not None:
i = self.downsample(i)
x += i
x = self.relu(x)
return x
위 __init__ 함수에서는 downsample 이라는 것이 사용되었다. Downsample 은 입력데이터의 크기와 네트워크를 통과한 후 출력 데이터의 크기가 다를 경우에 사용한다. 또, forward 함수 내에서 x += i 를 해주는 것을 확인할 수 있는데 이는 아이덴티티 매핑이 적용되는 부분인 것이다. 특정 층에 존재하는 출력 결과를 다음 합성곱층을 통과한 출력 결과에 더해주는 것으로 Skip Connection 이라고도 한다.
그 다음으로는 병목블록을 작성했다. 병목블록은 ResNet50, 101, 152 에서 사용되며 1 x 1 합성곱층, 3 x 3 합성곱층, 1 x 1 합성곱층으로 구성된다.
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, in_channels, out_channels, stride = 1, downsample = False):
super().__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size = 1, stride = 1, bias = False)
self.bn1 = nn.BatchNorm2d(out_channels)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size = 3, stride = stride, padding = 1, bias = False)
self.bn2 = nn.BatchNorm2d(out_channels)
self.conv3 = nn.Conv2d(out_channels, self.expansion * out_channels, kernel_size = 1,
stride = 1, bias = False)
self.bn3 = nn.BatchNorm2d(self.expansion * out_channels)
self.relu = nn.ReLU(inplace = True)
if downsample:
conv = nn.Conv2d(in_channels, self.expansion * out_channels, kernel_size = 1,
stride = stride, bias = False)
bn = nn.BatchNorm2d(self.expansion * out_channels)
downsample = nn.Sequential(conv, bn)
else:
downsample = None
self.downsample = downsample
def forward(self, x):
i = x
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.conv2(x)
x = self.bn2(x)
x = self.relu(x)
x = self.conv3(x)
x = self.bn3(x)
if self.downsample is not None:
i = self.downsample(i)
x += i
x = self.relu(x)
return x
병목블록은 기본블록이 3 x 3 합성곱층 두 개를 갖는 것과 달리 3 x 3, 1 x 1, 3 x 3 의 구조를 갖는다. 기본 블록을 병목 블록으로 대체하는 이유는 계층을 더욱 깊게 쌓으면서 계산에 대한 비용을 줄일 수 있기 때문이다. 그리고 계층이 많아진다는 것은 곧 활성화 함수가 기존보다 더 많이 포함된다는 뜻이며 이것은 더 많은 비선형성을 처리할 수 있음을 의미한다. 위에서 사용한 Skip Connection 과 병목블록을 통해 더욱 깊은 네트워크 계층을 가질 수 있는 것이다.
이제 ResNet 모델 Class 를 작성한다.
class ResNet(nn.Module):
def __init__(self, config, output_dim, zero_init_residual=False):
super().__init__()
block, n_blocks, channels = config
self.in_channels = channels[0]
assert len(n_blocks) == len(channels) == 4
self.conv1 = nn.Conv2d(3, self.in_channels, kernel_size = 7, stride = 2, padding = 3, bias = False)
self.bn1 = nn.BatchNorm2d(self.in_channels)
self.relu = nn.ReLU(inplace = True)
self.maxpool = nn.MaxPool2d(kernel_size = 3, stride = 2, padding = 1)
self.layer1 = self.get_resnet_layer(block, n_blocks[0], channels[0])
self.layer2 = self.get_resnet_layer(block, n_blocks[1], channels[1], stride = 2)
self.layer3 = self.get_resnet_layer(block, n_blocks[2], channels[2], stride = 2)
self.layer4 = self.get_resnet_layer(block, n_blocks[3], channels[3], stride = 2)
self.avgpool = nn.AdaptiveAvgPool2d((1,1))
self.fc = nn.Linear(self.in_channels, output_dim)
if zero_init_residual:
for m in self.modules():
if isinstance(m, Bottleneck):
nn.init.constant_(m.bn3.weight, 0)
elif isinstance(m, BasicBlock):
nn.init.constant_(m.bn2.weight, 0)
def get_resnet_layer(self, block, n_blocks, channels, stride = 1):
layers = []
if self.in_channels != block.expansion * channels:
downsample = True
else:
downsample = False
layers.append(block(self.in_channels, channels, stride, downsample))
for i in range(1, n_blocks):
layers.append(block(block.expansion * channels, channels))
self.in_channels = block.expansion * channels
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
h = x.view(x.shape[0], -1)
x = self.fc(h)
return x, h
위 __init__ 함수 내의 if zero_init_residual: 부분은 각 Residual branch 에 있는 마지막 Batch Normalization 을 0 으로 초기화해서 다음 Residual branch 를 0 에서 시작할 수 있도록 하는 것이다. BN 을 0 으로 초기화할 경우 모델 성능이 0.2 ~ 0.3 % 정도 향상될 수 있다고 한다.
위와 같이 작성한 Class 를 사용하기 위해서는 몇 가지 준비가 더 필요하다.
ResNetConfig = namedtuple('ResNetConfig', ['block', 'n_blocks', 'channels'])
resnet18_config = ResNetConfig(block = BasicBlock,
n_blocks = [2,2,2,2],
channels = [64, 128, 256, 512])
resnet34_config = ResNetConfig(block = BasicBlock,
n_blocks = [3,4,6,3],
channels = [64, 128, 256, 512])
resnet50_config = ResNetConfig(block = Bottleneck,
n_blocks = [3, 4, 6, 3],
channels = [64, 128, 256, 512])
resnet101_config = ResNetConfig(block = Bottleneck,
n_blocks = [3, 4, 23, 3],
channels = [64, 128, 256, 512])
resnet152_config = ResNetConfig(block = Bottleneck,
n_blocks = [3, 8, 36, 3],
channels = [64, 128, 256, 512])
위 Config 들을 사용하여 ResNet 모델을 다양한 방식으로 사용해볼 수 있다. 이번 실습에서는 ResNet50 을 사용해보았다.
OUTPUT_DIM = 2
model = ResNet(resnet50_config, OUTPUT_DIM)
print(model)
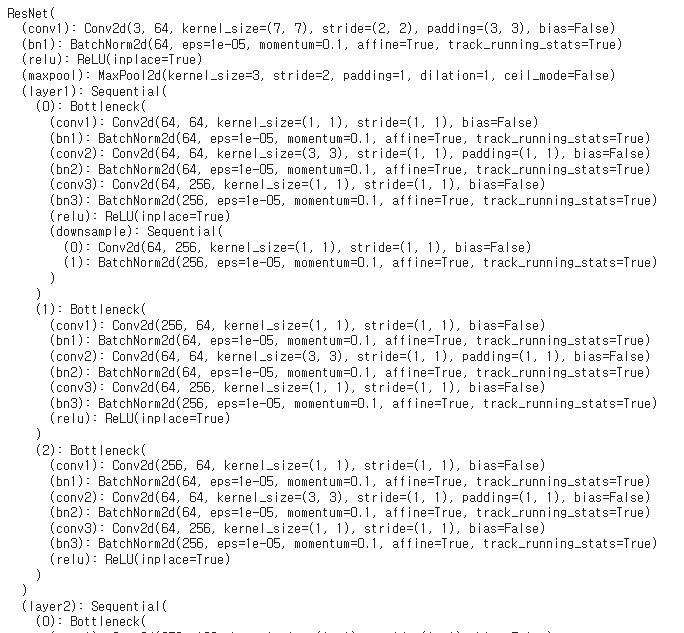
모델은 준비되었으니 옵티마이저와 손실함수를 정의한 다음 학습 지표를 계산하는 함수를 작성한다.
optimizer = optim.Adam(model.parameters(), lr=1e-7)
criterion = nn.CrossEntropyLoss()
model = model.to(device)
criterion = criterion.to(device)
def calculate_topk_accuracy(y_pred, y, k = 2):
with torch.no_grad():
batch_size = y.shape[0]
_, top_pred = y_pred.topk(k, 1)
top_pred = top_pred.t()
correct = top_pred.eq(y.view(1, -1).expand_as(top_pred))
correct_1 = correct[:1].reshape(-1).float().sum(0, keepdim = True)
correct_k = correct[:k].reshape(-1).float().sum(0, keepdim = True)
acc_1 = correct_1 / batch_size
acc_k = correct_k / batch_size
return acc_1, acc_k
calculate_topk_accuracy 가 학습이 잘 되었는지 모델 성능 평가를 진행하는 함수이다. 여기서 사용된 tensor.topk 메서드는 torch.argmax() 와 같은 효과이다. 주어진 텐서에서 가장 큰 값의 인덱스를 얻기 위해 사용된다. 그 다음 줄에서 사용된 .t() 메서드는 주어진 텐서의 전치행렬을 반환한다.
이제 모델학습, 평가를 진행하기 위한 코드를 작성한다.
def train(model, iterator, optimizer, criterion, device):
epoch_loss = 0
epoch_acc_1 = 0
epoch_acc_5 = 0
model.train()
for (x, y) in iterator:
x = x.to(device)
y = y.to(device)
optimizer.zero_grad()
y_pred = model(x)
loss = criterion(y_pred[0], y)
acc_1, acc_5 = calculate_topk_accuracy(y_pred[0], y)
loss.backward()
optimizer.step()
epoch_loss += loss.item()
epoch_acc_1 += acc_1.item()
epoch_acc_5 += acc_5.item()
epoch_loss /= len(iterator)
epoch_acc_1 /= len(iterator)
epoch_acc_5 /= len(iterator)
return epoch_loss, epoch_acc_1, epoch_acc_5
def evaluate(model, iterator, criterion, device):
epoch_loss = 0
epoch_acc_1 = 0
epoch_acc_5 = 0
model.eval()
with torch.no_grad():
for (x, y) in iterator:
x = x.to(device)
y = y.to(device)
y_pred = model(x)
loss = criterion(y_pred[0], y)
acc_1, acc_5 = calculate_topk_accuracy(y_pred[0], y)
epoch_loss += loss.item()
epoch_acc_1 += acc_1.item()
epoch_acc_5 += acc_5.item()
epoch_loss /= len(iterator)
epoch_acc_1 /= len(iterator)
epoch_acc_5 /= len(iterator)
return epoch_loss, epoch_acc_1, epoch_acc_5
def epoch_time(start_time, end_time):
elapsed_time = end_time - start_time
elapsed_mins = int(elapsed_time / 60)
elapsed_secs = int(elapsed_time - (elapsed_mins * 60))
return elapsed_mins, elapsed_secs
train 을 위한 준비가 마쳐졌으니 아래 코드를 통해 학습을 진행한다.
best_valid_loss = float('inf')
EPOCHS = 10
for epoch in range(EPOCHS):
start_time = time.monotonic()
train_loss, train_acc_1, train_acc_5 = train(model, train_iterator, optimizer, criterion, device)
valid_loss, valid_acc_1, valid_acc_5 = evaluate(model, valid_iterator, criterion, device)
if valid_loss < best_valid_loss:
best_valid_loss = valid_loss
torch.save(model.state_dict(), '../ResNet-model.pt')
end_time = time.monotonic()
epoch_mins, epoch_secs = epoch_time(start_time, end_time)
print(f'Epoch: {epoch+1:02} | Epoch Time: {epoch_mins}m {epoch_secs}s')
print(f'\tTrain Loss: {train_loss:.3f} | Train Acc @1: {train_acc_1*100:6.2f}% | ' \
f'Train Acc @5: {train_acc_5*100:6.2f}%')
print(f'\tValid Loss: {valid_loss:.3f} | Valid Acc @1: {valid_acc_1*100:6.2f}% | ' \
f'Valid Acc @5: {valid_acc_5*100:6.2f}%')
학습이 잘 진행되는 것을 확인할 수 있다.
Reference:
딥러닝 파이토치 교과서
'Machine Learning > Pytorch' 카테고리의 다른 글
| 딥러닝 파이토치 교과서 (6-6: 이미지분할을 위한 신경망) (0) | 2023.03.31 |
|---|---|
| 딥러닝 파이토치 교과서 (6-5: 객체인식을 위한 신경망) (0) | 2023.03.29 |
| 딥러닝 파이토치 교과서 (6-4: GoogLeNet, ResNet(1)) (0) | 2023.03.22 |
| 딥러닝 파이토치 교과서 (6-3: VGGNet (2)) (0) | 2023.03.21 |
| 딥러닝 파이토치 교과서 (6-3: VGGNet (1)) (0) | 2023.03.20 |



